12月1日,香港城市大學生物醫學工程系申亞京教授應機電工程學院邀請,做客我校主辦的“微機器人及微系統國際前沿論壇系列報告”,作了題為“Bioinspired Small Robotics for Biomedical Engineering”的英文學術報告。此次報告會采用線上與線下相結合的方式,由機電工程學院常博主持,校內外50多位學者、研究生聆聽了報告。
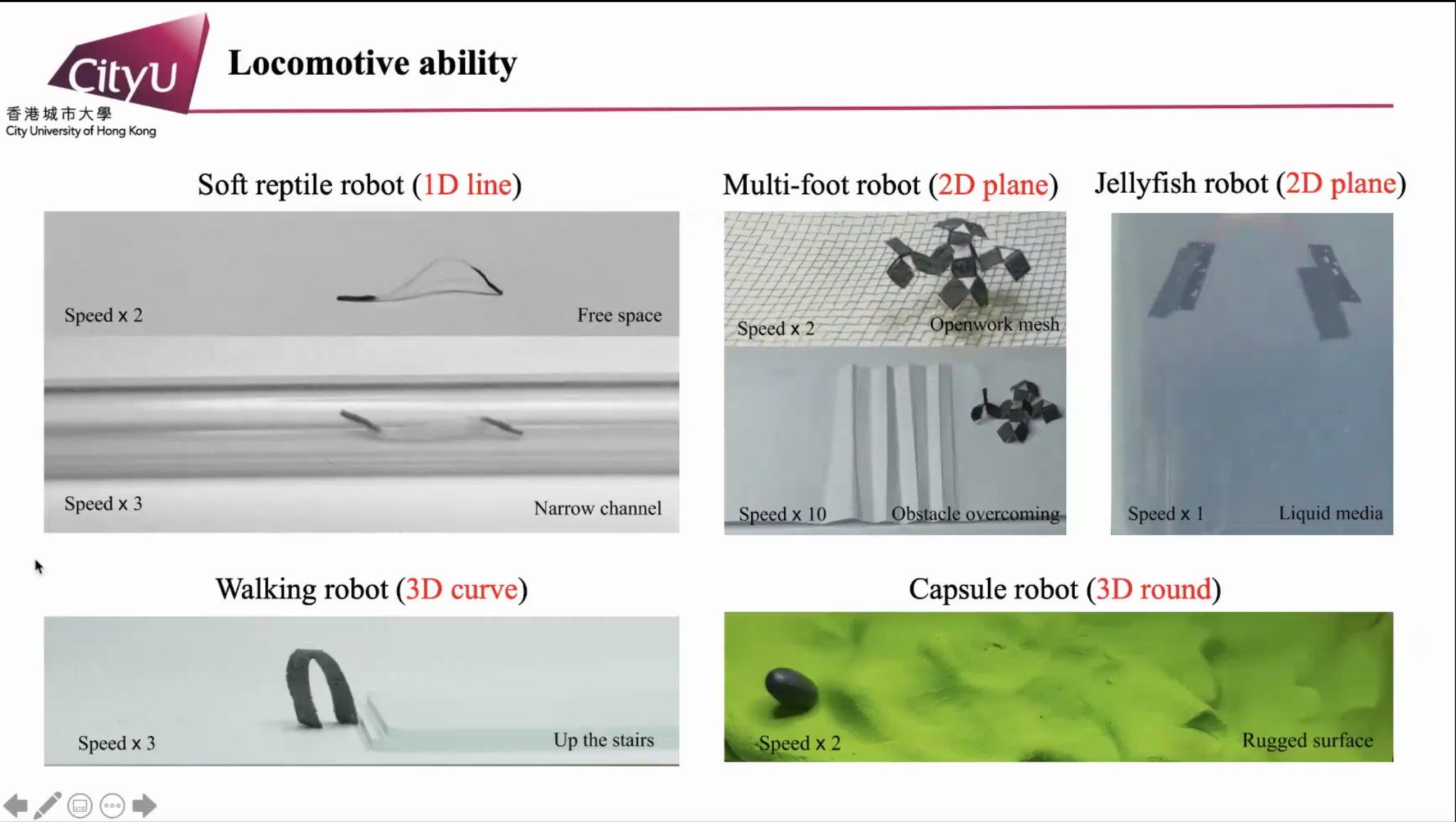
申亞京教授在報告中介紹了微/納米機器人的發展歷程,闡述了微/納米機器人在生物醫學領域的長足發展以及面臨的挑戰。。申亞京教授介紹了課題組研發的一種集成了遠程控制、環境感知、遠程通訊為一體的微型軟體機器人,該機器人可以通過磁場的控制,用拍打的方式或左右擺動的方式運動,可負載超過自身重量百倍的物體移動。申亞京教授還展示了他們研發的一種磁性噴霧,這種噴霧可以將無生命物體轉變為磁控微型機器人。當磁性噴霧噴涂在棉線、折紙、PDMS薄膜和塑料管等不同材料和形狀的物體時,這些物體即刻轉化為磁控機器人,在磁場驅動下可以實現爬行、行走、滾動、游動等運動形式。他還介紹了團隊研發的一種基于磁性薄膜的觸覺傳感器,這種觸覺傳感器由一層經過單面多級正弦磁化的磁膜、以及嵌在印刷電路板上的霍爾傳感器構成,能實時反饋受力情況、自適應抓取易碎物體,還能根據受力變化和定位精度,及時調整力的大小和方向。

機電學院師生積極向申亞京請教了磁控微型機器人所控制物體的尺度、控制精度、控制方式以及應用前景等問題,申亞京耐心地進行了解答,此次論壇帶來同行最新的研究成果,開闊了學院師生的視野。
新聞小貼士:
國家優秀青年科學家,香港杰出青年學者,IEEE機器人與自動化學會日本區杰出青年,榮獲IEEE ICRA 2011“最佳操作機器人論文獎”,IEEE MARSS 2018“Big-on-Small”獎。現任香港城市大學生物醫學工程系副教授,IEEE高級成員,中國微納機器人學會執行委員,IEEE Transactions on Robotics副主編。主要研究方向為小型/生物仿生機器人、智能系統及其在生物醫學工程中的應用。在頂級多學科期刊Science Robotics、Nature Communications、頂級專業期刊IEEE Transactions on Robotics、頂級國際會議ICRA、IROS等雜志/會議中發表100余篇期刊文章/會議文章,并被美聯社、湯森路透等國際媒體廣泛報道。
(核稿:夏祥林 編輯:郭姍姍)


 陜公網安備 61011202000334號
陜公網安備 61011202000334號